

Tiny robots that can jump on water created by scientists [Video]

Small robots that jump on water have been created by scientists and could one day be used in surveillance and search and rescue missions.
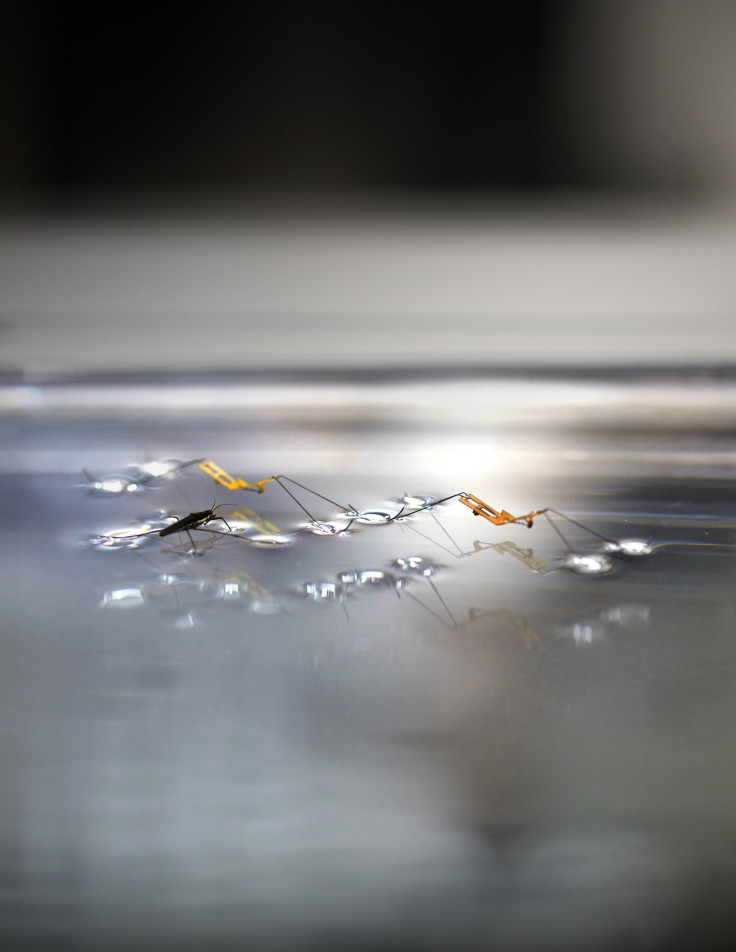
The team led by Seoul National University's Je-Sung Koh studied water striders to replicate the insect's ability to propel itself from the surface of water. When jumping from solid ground, a force is exerted on the ground below and the jumping object can push itself upwards. On water, however, you lose the surface tension force required.
Published in the journal Science, the team watched the water striders leap using high-speed cameras and found how their long legs accelerate gradually, meaning the water surface does not react to the propelling force too quickly and lose contact with the legs.
The team found the maximum force from the water striders' legs always remains just below the maximum force the water surface tension can withstand. They also noticed how the insect rotated its legs as it took off.
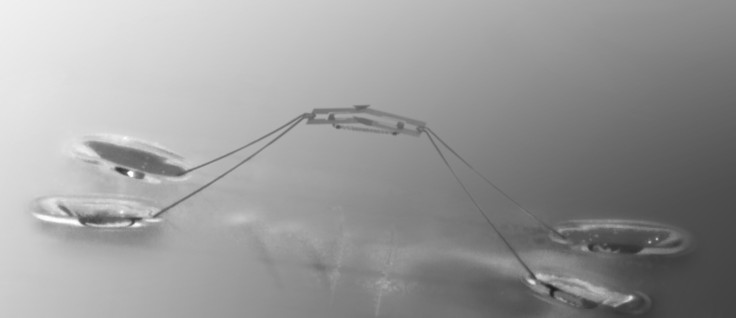
They then applied this knowledge to create a robot using the same principle – something they call a torque reversal catapult (TRC) mechanism. Kyu-Jin Cho, one of the senior authors on the paper, explained: "What was very important for us while building the water jumping robot was to make sure the maximum force does not exceed the maximum surface tension force.
"What we have devised was a very small bio-inspired jumping mechanism called a torque reversal catapult mechanism which applies a small force initially then the force increases gradually and thereby we can maximise the momentum transfer without exceeding the maximum surface tension force. The water strider is rotating its legs to maximise the interaction time between the legs and the water thereby maximising the momentum transfer."
In terms of the real-world application, the researchers said their main aim was just to engineer something that can jump on water like some insects can. "It was this challenge that drove us to this research," they said. "This challenge was interesting to biologists, fluid mechanics researchers and robotics researchers, all alike.
"Our goal was to explore a new possibility of a robot's aquatic mobility that was never possible before [surface-tension dominated jumping] with even a simple design and thus a low cost. We hope that this novel motility will be incorporated in the next-step research of small scale robots. If these endeavours are added up, we will see those robots only to be seen in movies for now, in reality later."
They also noted it could be utilised for surveillance in the future: "This robotic technology could probably be used for building large number of robots that can float, and jump on water for surveillance missions."
They added: "A small insect-mimicking robot cannot perform complicated tasks as large robots [like humanoids] aim to do. But there are situations where you don't need an expensive large robot but need many small cheap robots carrying out simple tasks over a wide area at the same time. Those applications include surveillance, survivor search in disaster site, etc.
"In the far future, we would like to be able to build a robot that can swim and jump on water and perform various tasks on water for surveillance gathering data from the water surfaces. This would require various other technologies to be also miniaturised, such as the electronics, sensors, and batteries, which cannot be done by just our group."
© Copyright IBTimes 2024. All rights reserved.



