Robotic Glove Gives Users Two Extra Fingers


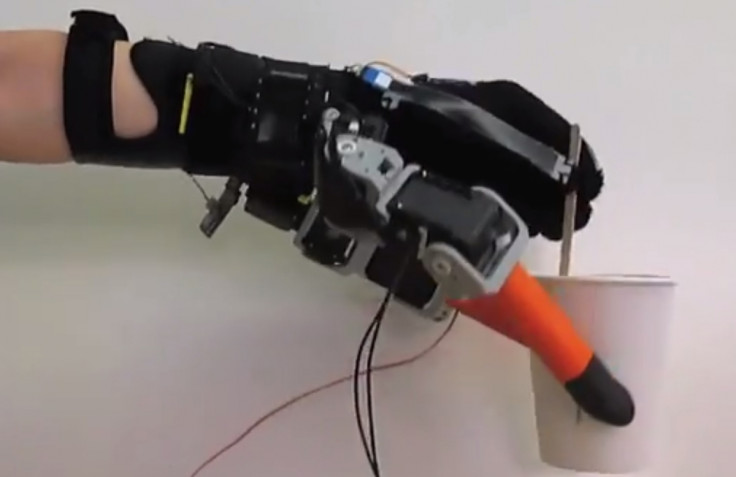
A wrist-mounted device has been developed by researchers at the Massachusetts Institute of Technology (MIT) that augments the abilities of the human hand through two robotic fingers.
The new device makes two-handed tasks like opening a letter or removing a bottle cap possible by using a grasping motion that mimics the movement of a hand.
"This is a completely intuitive and natural way to move your robotic fingers," said Harry Asada, a professor of engineering at MIT. "You do not need to command the robot, but simply move your fingers naturally, Then the robotic fingers react and assist your fingers."
Asada believes that the robotic fingers could be used to assist people with limited dexterity or disabilities, as well as for "other healthy people" who want to increase their own capabilities.
'Supernumerary robotic fingers'
In order to extend a hand's biomechanical synergy from five fingers to seven, graduate student Faye Wu used a glove fitted with position-recording sensors with the robotic appendages - or "supernumerary robotic (SR) fingers - attached to her wrist with a brace.
By manually placing her hand and the robotic fingers in certain positions, Wu was able to record the data and develop an algorithm that correlated the angles of the hand and the fingers. This allowed the device to learn what hand postures required what robotic finger positions.
"Through sequencing and superposition of only a few synergies we can achieve a variation of complex motions that we perform on a daily basis," Wu said.
"With the assistance of the SR fingers the user can grasp objects that are usually too difficult for them to do with a single hand, for example objects that are too large, too heavy, or the surface of the object is too hot or too cold."
Human and robot interaction
Currently the device is only able to adjust its posture in accordance to a hand's position but Wu hopes that in the future it will also be able to control force.
"There are other things (besides posture) that make a good stable grasp," Wu added. "With an object that looks small but is heavy, or is slippery, the posture would be the same, but the force would be different, so how would it adapt to that? That's the next thing we'll look at."
Matthew Mason, director of the Robotics Institute at Carnegie Mellon University, who was not involved in the research, believes that the MIT research is groundbreaking in its drawing together of humans and robots.
"This is breaking new ground on the question of how humans and robots interact," Mason said. "It is a novel vision, and adds to the many ways that robotics can change our perception of ourselves."
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology