Space Junk: Ultra-Fast Bionic Arm Has Potential to Capture Dangerous Debris Orbiting Earth

A robotic arm developed by Swiss researchers could be used to capture debris orbiting our planet, according to its creators.
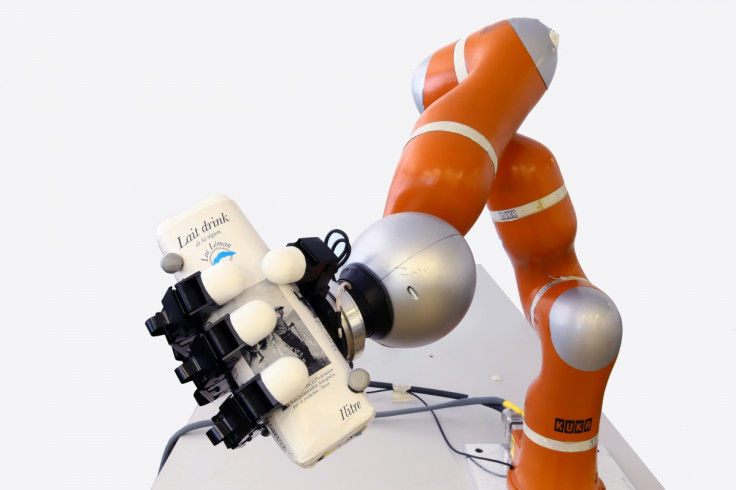
The bionic arm, which was developed by researchers at École polytechnique fédérale de Lausanne (EPFL), one of the two Swiss Federal Institutes of Technology, is capable of grasping flying objects with complex shapes and trajectories in less than five-hundredths of a second.
With its palm open, the robot is completely motionless. But a split second later, it unwinds and catches a variety of flying objects - including a tennis racket, a ball and a bottle. Measuring around 1.5m high, it has a sophisticated hand with four fingers.
It was programmed at the Learning Algorithms and Systems Laboratory at EPFL.
"Increasingly present in our daily lives and used to perform various tasks, robots will be able to either catch or dodge complex objects in full-motion, said Aude Billard, head of Lasa.
"Not only do we need machines able to react on the spot, but also to predict the moving object's dynamics and generate a movement in the opposite direction."
Researchers have said the arm has a potential application in space. It has been associated with the Clean- mE project carried out by the Swiss Space Center, which aims to develop technologies for the disposal of space debris orbiting Earth.
Fitted on a satellite, the arm would have the task of catching flying debris, whose dynamics are only partially known. Therefore, the robot will not be able to work out such dynamics with precision until in space, by observing the movement of the approaching objects.
Researchers were inspired by the way humans themselves learn: by imitation and trial and error. This technique, called Programming by Demonstration, shows the arm examples of possible trajectories.
"Today's machines are often pre-programmed and cannot quickly assimilate data changes, Lasa's Aude Billard told the Business Standard. "Consequently, their only choice is to recalculate the trajectories, which requires too much time from them in situations in which every fraction of a second can be decisive."
Objects are thrown several times in the robot's direction. Through a series of cameras, the robot creates a model for the objects' kinetics based on their trajectories, speeds and rotational movement.
Scientists then translate it into an equation which allows the robot to position itself in the right direction whenever an object is thrown.
This week, the Department of Defense, Federal Aviation Authority and Federal Communications Commission have been summoned by the US House of Representatives to address the emerging issue of space debris, as reported by the Authint Mail.
The Department of Defense's Joint Space Operations Center currently tracks around 23,000 objects in low-Earth orbit. Nasa estimates that approximately 500,000 objects - bigger than marbles - circle the planet at around 17,500mph.
This invention was described in IEEE Transactions on Robotics.
© Copyright IBTimes 2025. All rights reserved.
- MOST READ