

GuardBot: US marines testing robot guard balls that can swim and roll on any terrain

The US marines are currently testing out an unmanned spherical robot ball that can both swim in water and roll across most terrain in order to perform reconnaissance for armed forces.
GuardBot is the brain child of GuardBot Inc, a robotics firm based in Stamford, Connecticut in the US.
The idea for the robot was first conceived in 2004, and the autonomous robot was initially designed to go to Mars, but now the US Navy is interested in using robot as a guard in unknown territory, and to provide reconnaissance in warfare.
It has taken creator Peter Muhlrad over seven years to develop the amphibious robot, which can swim through water at a speed of 4mph and roll along terrain including sand and snow at 20mph, even if the ground has a 30-degree incline.
The technology behind the robot is a "pendulum motion" propulsion system featuring nine-axis stability, whereby a range of algorithms control the robot's steering by shifting its centre of gravity back and forth.
The beauty of the technology is that it can be used to produce scalable robot balls, which can go down to being as small as 10cm in diameter, or as large as 9ft in diameter.
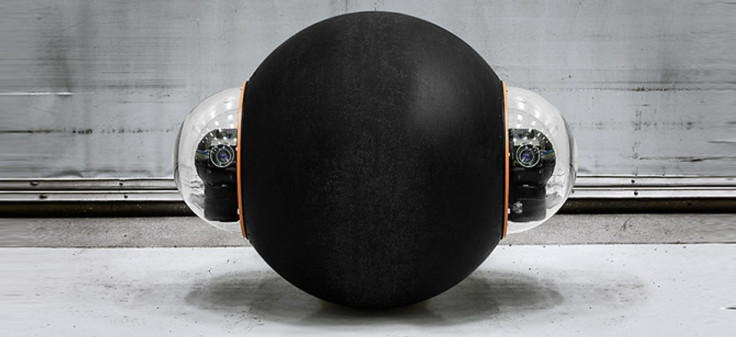
There are two transparent half-spheres fitted into the side of the robot ball which carry cameras and a multitude of sensors to capture live streaming video footage of opposite directions simultaneously.
Lasting up to eight hours on a single charge, GuardBot can be remotely operated using a 2-8GHz datalink and a laser spectroscope located in the transparent half-spheres is capable of detecting the chemicals used to make bombs from a distance of just 2 inches away.
According to Defense One, GuardBot's technology is protected by a number of patents, and as the research has been conducted in collaboration with the Navy, the government maintains a use license, but the researcher can commercialise their invention as they have not received government funding.
At the moment, GuardBot is still being tested with the US Marine Corps Warfighting Lab in operational environments, such as getting the robot to deploy from and return back to naval boats.
Muhlrad's team is also working on new software that incorporates geographic information system (GIS) data, so that in future command control could pick a spot on a map, and the robot would work out the geographic coordinates for itself and immediately travel to the location.
"Depending on if we get funding, we could develop that in 8 to 10 months," Muhlrad told Defense One.
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology



















