

Flying Robots Learn to Work Together and Pick, Hold, Transport Objects Over Distances in EU's Arcas Project
With the European Union's Arcas project nearing fruition, we could have a team of flying robots joining the legion of crawling, walking and leaping robots.
While unmanned air-borne vehicles are already in operation, the Arcas robots come equipped with multi-joint manipulator arms that can grasp, hold and deposit an object at the required place, according to the EU's CORDIS portal.
The robots are programmed with information and 3D maps to orient them, equipped with sensors that correct mistakes and taught how to land safely in an emergency or fly home automatically when they lose contact with base.
They have already demonstrated aerial manipulation with six- and seven-joint arms, and perception and planning functionalities, claimed to be a first worldwide.
The immediate use would be in rescue missions and inspection and maintenance in the energy and space sectors. The project managers believe the robots could eventually be deployed to dismantle satellites, service space stations or even help remove space junk.
"The idea is that the robots should be able to fly in anywhere where it is impossible or impractical for piloted aircraft or ground robots to operate," explained Arcas project manager Professor Aníbal Ollero, of the University of Seville.
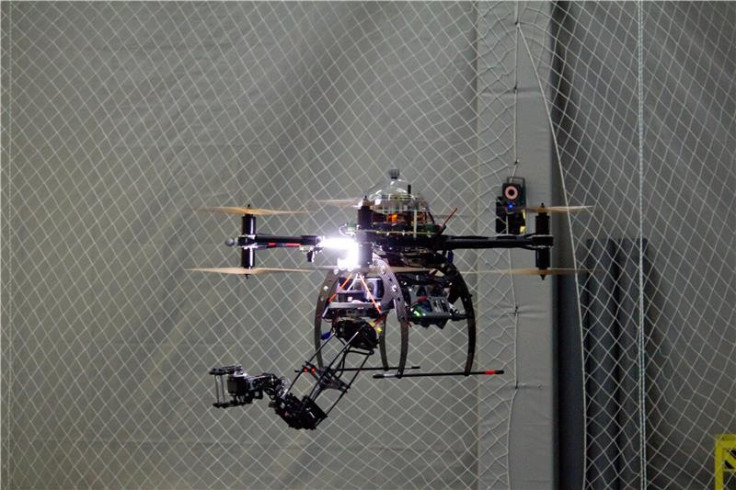
"We have helicopters, and multi-rotor systems with eight rotors to give more hovering control, increase the payload and carry arms with greater degrees of freedom."
Indoor and outdoor demonstrations have shown the robots capable of working together and grasping and transporting bars over a distance before depositing them.
The team is now working to improve accuracy and repetitiveness in different conditions, as also their robustness and reactivity, working them in bigger numbers and increasing the complexity of tasks.
© Copyright IBTimes 2025. All rights reserved.
- MOST POPULAR IN Technology


















