Watch how this insanely smart dartboard moves to make sure you hit bullseye every time
Former Nasa engineer spends three years creating a robotic dartboard that makes sure you never miss.


Cheating at a pub game like darts isn't going to earn you any friends. But what if you spend three years building a dartboard which moves in milliseconds to guarantee you hit the bullseye every time? Then we can make an exception.
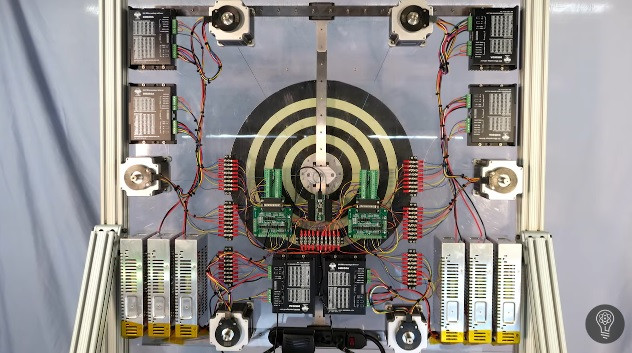
The dartboard you see here is the work of Mark Rober, an ex-Nasa engineer who has spent three years and more money than he is willing to admit on a six-motor system which analyses a dart's trajectory and moves the board to make sure you hit the 50-point target – all in 0.4 seconds, or 400 milliseconds.
Rober's contraption is a remarkable feat of engineering, especially when you consider how much is going on in the 200 milliseconds after the dart is released (the time the board takes to compute) and the second 200 milliseconds it takes for the board to move into position.
The board uses six infrared motion-tracking cameras to 'see' each dart moving through the air. These are standard darts, but with infrared reflectors added so the cameras can track them. Just 0.2 seconds after the dart is released, the computer powering the board has a good idea of where it will land; it then spends a further 0.2 seconds telling the six motors how to move, but the computer is so fast it can make up to 100 adjustments to the board's position in that 0.2 second window.
But the board isn't infallible. Players can only land a guaranteed bullseye if the original landing spot of the dart falls within the inner red and green circle of treble scores.
Each motion-tracking camera can take a 4K-resolution image 260 times per second, but instead of using regular video to see the dart, they blasts out infrared beams, which then bounce off the dart and back into the camera lens.
The key here is to understand that objects thrown like a dart (or a basketball, or even a high-jumper) fly, ignoring wind resistance which is near-zero in a pub, in a perfect 'parabola', or arc.
Once the location is determined, the board then has to move. This is down by pushing and pulling it along two sliders, one horizontal and one vertical, with six rotating motors attached to the back of the board with fishing line. After working out the trigonometry of the dart, a laptop computer sends commands along a cable to an Arduino circuit on the back of the board, which then passes the instructions through a set of amplifiers to increase the voltage and to the motors.
Now, milliseconds before the dart arrives at the board, the motors spool up to push and pull the bullseye to the right position. But there's more. Rober explains: "We don't just make one guess on the final position of the board. We update and refine that guess anywhere from 10 to 100 times, which is why the board sometimes jitters into the final position."
© Copyright IBTimes 2025. All rights reserved.
- MOST READ