

Robot 'mermaid' recovers treasure from King Louis XIV shipwreck off the coast of France

Stanford University has developed an artificially intelligent humanoid diver robot that was able to successfully recover treasures from a 17<sup>th century shipwreck off the coast of France and bring items back up to the water's surface to researchers waiting in a boat.
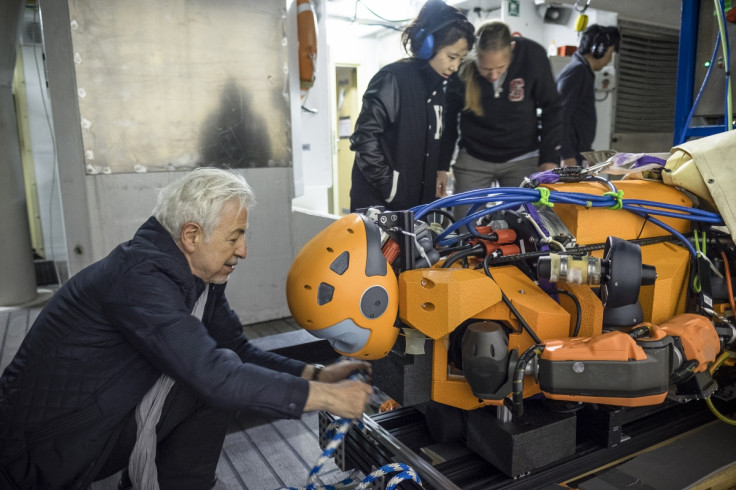
The OceanOne robot looks like a human diver and it is about 5ft in length. Its head features a stereoscopic camera that allows the researchers controlling the robot to see everything the robot sees, and it has two fully articulated arms as well as wrists fitted with force sensors that relay haptic feedback to the joystick held by the pilot, so the researcher can tell whether the robot is holding onto something that is firm and heavy or light and delicate.

Meanwhile, the lower section of the robot 'mermaid', which doesn't have legs, features eight multi-directional thrusters to help the robot move, as well as batteries to power the robot and computers that detect what sort of object is being grasped and ensure that just the right amount of pressure is applied to keep a firm hold on the item while not damaging the object due to too much force.
"OceanOne will be your avatar. The intent here is to have a human diving virtually, to put the human out of harm's way," said Oussama Khatib, a professor of computer science at Stanford University. "Having a machine that has human characteristics that can project the human diver's embodiment at depth is going to be amazing."
Testing the robot at a real archaeological site

To prove that their humanoid robot prototype worked, Khatib's team of undergraduate and graduate students, together with mechanical engineering professor Mark Cutkosky, flew to France and collaborated with Michel L'Hour, the director of underwater archaeology research in France's Ministry of Culture.
L'Hour's team of deep-sea archaeologists had previously conducted remote studies of an area 20 miles off the southern coast of France where La Lune, the flagship of King Louis XIV had sunk in 1664 – an untouched shipwreck that could still potentially hold countless treasures and artefacts.
The researchers waited in a boat on the ocean's surface while a support underwater vehicle was commanded by Vincent Creuze, a researcher with the Universite de Montpellier, to hold the robot's support tether at a safe distance and provide third-person visuals of the robot.
The data about the shipwreck had been sent to OceanOne, and once it was lowered into the water, the robot autonomously swam down to the wreck. Khatib was at the joystick controls just in case, but for the most part, the robot kept itself steady and avoid colliding with obstacles as its onboard sensors helped to gauge the ocean current and turbulence.
Retrieving treasures from the ocean

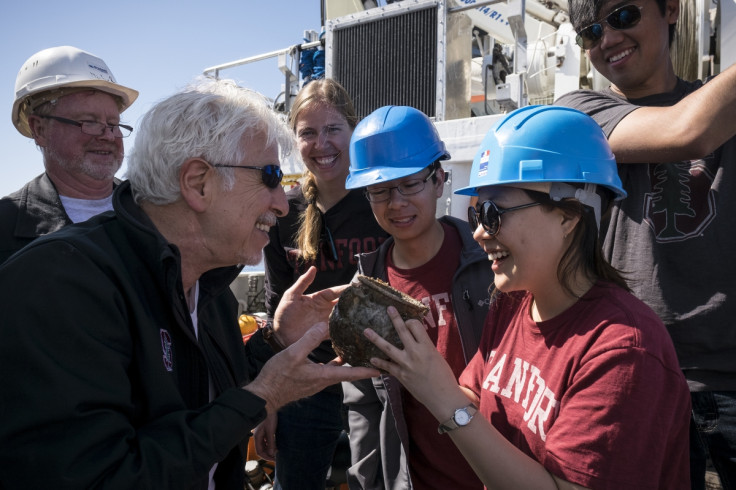
And when Khatib spotted a vase the size of a grapefruit from the video feed sent back by the robot, he was able to assume control over the robot, command the robot to hover over the vase, reach out with its arms, feel for the vase's contours and weight, and then stick one finger inside the vase to get a good grip on the item.
Once the robot had the vase safely in its grip, Khatib then commanded the robot to swim over to a recovery basket, place the vase carefully into it and shut the lid securely, before passing the basket to a waiting human diver to take to the surface. "You can feel exactly what the robot is doing. It's almost like you are there; with the sense of touch you create a new dimension of perception," said Khatib. "We connect the human to the robot in very intuitive and meaningful way. The human can provide intuition and expertise and cognitive abilities to the robot. The two bring together an amazing synergy. The human and robot can do things in areas too dangerous for a human, while the human is still there."
© Copyright IBTimes 2025. All rights reserved.
- MOST READ



















